電極偏移����、個體/時段差異、肌肉疲勞�、手臂姿態(tài)等非理想肌電信號采集范式
近日,中國科學院沈陽自動化研究所在非理想手勢肌電信號數(shù)據(jù)集構建方面研究取得新進展����。相關成果以SeNic: An Open Source Dataset for SEMG-Based Gesture Recognition in Non-Ideal Conditions為題發(fā)表在康復醫(yī)學領域一區(qū)Top期刊IEEE Transactions on Neural Systems and Rehabilitation Engineering上。
傳統(tǒng)基于肌電的人機接口研究往往在實驗室理想環(huán)境下采集肌電信號�,然而在實際交互應用中受到諸多非理想因素干擾,極大降低了肌電識別模型的準確性及交互控制系統(tǒng)的穩(wěn)定性和魯棒性����。針對非理想肌電的意圖識別研究有望解決實驗室與實際應用之間的鴻溝,具有非常重要的意義��,而當前這一領域研究的瓶頸問題是急需大規(guī)模���、包含多種非理想情形的肌電信號數(shù)據(jù)集���。
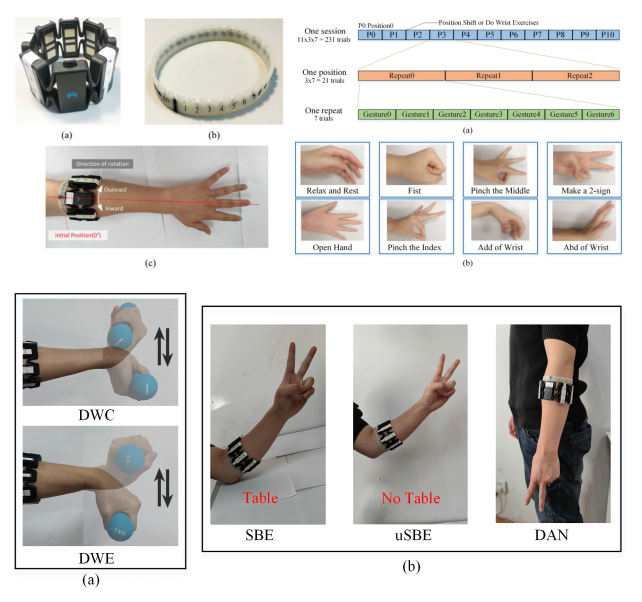
醫(yī)療康復機器人研究組在國際上首次構建了一個非理想手勢肌電信號數(shù)據(jù)集(SeNic),設計了針對電極偏移�、個體差異、不同時段差異�、肌肉疲勞�����、手臂姿態(tài)影響等五種非理想因素干擾的新型采集范式,并對應采集了36名被試共計超過100小時的7類手勢肌電信號數(shù)據(jù)����。該數(shù)據(jù)集根據(jù)CSV格式標準進行整理并開源(下載地址https://github.com/bozhubo/SeNic),提供五種非理想類型肌電數(shù)據(jù)以滿足不同研究者的需求���。該項工作為基于非理想肌電信號的意圖識別研究提供了重要的基準數(shù)據(jù)集和技術支持�����,將促進肌電交互接口系統(tǒng)的發(fā)展����,推動其在神經(jīng)康復和智能機器人領域的廣泛應用�。
沈陽自動化所醫(yī)療康復機器人研究組長期專注于腦/肌電信號解碼、人機/腦機智能交互等關鍵技術及系統(tǒng)研發(fā)��,在非理想腦肌電信號識別���、運動意圖解碼���、肌電交互����、腦機接口等方面的研究取得多項創(chuàng)新成果����。近年來多篇研究成果發(fā)表在國際知名學術期刊IEEE Transactions on Neural Systems and Rehabilitation Engineering (2021,2022)���,Biomedical Signal Processing and Control (2022)���,F(xiàn)rontiers in Neurorobotics (2021),IEEE Journal of Biomedical and Health Informatics (2021)����,Journal of Neural Engineering (2020),F(xiàn)rontiers in Neuroscience (2018)����,以及IEEE Transactions on Systems, Man, and Cybernetics: Systems (2016),相關成果獲得國內(nèi)外研究人員的廣泛關注���。
該研究得到了國家自然科學基金聯(lián)合基金重點項目��、面上項目���,以及遼寧省興遼英才計劃項目的大力支持�����。